

Durch virtuelle Inbetriebnahme mit RoboDK lassen sich komplette Anlagen digital durchtesten, bevor physische Systeme aufgebaut sind. Abläufe, Pfade und Steuerungslogiken werden offline im Browser effizient optimiert, ohne Stillstände der Produktionslinie. Dies führt zu erheblichen Zeit- und Kosteneinsparungen, weil Nacharbeiten und Verzögerungen minimiert werden. Eine kostenlose Webversion erleichtert den Einstieg und ermöglicht schnelle Prototypenprüfungen. Die Lösung, entstanden im CoRo-Labor der ETS University in Montreal, wird weltweit von über 50.000 Anwendern genutzt.
Inhaltsverzeichnis: Das erwartet Sie in diesem Artikel
Kosten sparen und Verzögerungen verhindern dank effizienter digitaler Inbetriebnahmesimulation
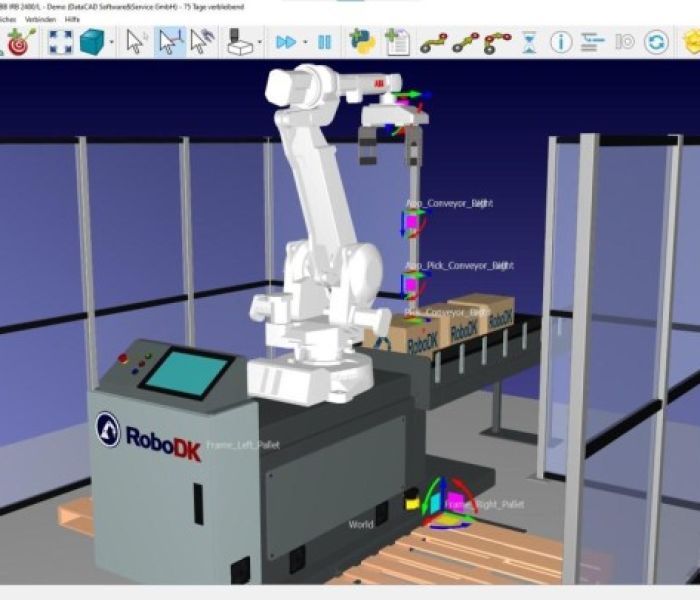
Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
Vor dem physischen Aufbau ermöglicht die virtuelle Inbetriebnahme ein vollumfängliches Debugging der Steuerungsprogramme und Bahnbeschreibungen. In einer 3D-Simulationsumgebung werden Antriebe, Sensoren und Greifer virtuell verknüpft, um Abläufe zu überprüfen und Kollisionen zwischen Maschinenkomponenten aufzudecken. Dank dieses frühen Validierungsprozesses reduzieren sich Stillstandszeiten während des realen Starts erheblich. Qualitätsanforderungen lassen sich besser einhalten, Projektkosten sinken durch weniger Nacharbeit und die Anlagenverfügbarkeit steigt signifikant. Frühzeitige Simulation erhöht Effizienz, Qualitätssicherung und interne Kommunikation deutlich.
Komplexitätszuwachs und Qualitätsansprüche erfordern digitale, effiziente Inbetriebnahme und Simulationslösungen
Steigende Lohnkosten, anspruchsvolle Produktionsverfahren und hohe Qualitätsansprüche erhöhen den Druck auf Unternehmen, Prozesse schlanker und kosteneffizienter zu gestalten. Durch virtuelle Inbetriebnahme lassen sich Anlagenmodelle vollständig digital auf Funktionsfähigkeit, Sicherheitsparameter und Taktzeiten prüfen, bevor Hardware-Komponenten vor Ort zusammengefügt werden. Diese frühzeitige Validierung vermeidet Nacharbeiten, senkt Personalkosten während der Implementierung und ermöglicht eine parallele Entwicklung von Planung und Ausführung. Das Ergebnis sind kürzere Markteinführungszeiten und geringeres Projektrisiko. Ressourcen werden sukzessive effizienter eingesetzt.
Realitätsnahe Kinematik, Greiferwechsel und Trajektorien offline testen und validieren

Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
RoboDK kombiniert umfangreiche Simulationsmöglichkeiten mit einer leistungsfähigen Offline-Programmierung, um Roboterbewegungen bereits vor realer Inbetriebnahme zu optimieren. Anwender modellieren Kinematiken, implementieren Greiferwechsel und testen komplexe Bahnführungen in Echtzeit. Die Plattform unterstützt mehr als 80 Roboterhersteller und ermöglicht über 1.200 Modelle ohne zusätzliche Treiber. Nach Anpassung exportieren Entwickler die optimierten Steuerungsprogramme direkt in die Zielsteuerung. So lassen sich Fehlerquellen früh erkennen, Umrüstzeiten minimieren und die Anlagenverfügbarkeit maximieren. Dies erfolgt spürbar und kosteneffizient.
Vorab-Simulation mit RoboDK erhöht Anlagenverfügbarkeit und beschleunigt Produktionsprozesse maßgeblich
Mit RoboDK lassen sich Fertigungsprozesse bereits vorab in einer digitalen Umgebung durchspielen, wodurch Roboterprogramme unabhängig vom realen Produktionsbetrieb getestet werden. Bereits während der Planungsphase werden Kollisionen sowie ineffiziente Pfadverläufe aufgedeckt, wodurch aufwändige Nacharbeiten entfallen. Die verkürzten Inbetriebnahmezeiten führen zu einer deutlich höheren Anlagenverfügbarkeit und verringern die Gesamtprojektkosten. Unternehmen profitieren somit von optimierten Abläufen, zuverlässigen Zeitplänen und einer nachhaltigen Reduktion von Stillstand- und Wartungszeiten im Produktionsumfeld. Die Offline-Prüfung bietet außerdem Flexibilität bei Ressourcenplanung und minimiert Risiken bei der Realanbindung.
Frühe RoboDK-Validierung bei Komplexanlagen amortisiert Investition schnell und effizient
Durch virtuelle Validierungszyklen mit RoboDK profitieren Unternehmen von deutlich niedrigeren Einrichtungszeiten und einer drastischen Reduktion von Nacharbeiten. Die Simulation komplexer Multiroboter-Setups und mehrstufiger Produktionsabläufe deckt potenzielle Engpässe, Kollisionen und Suboptimalitäten früh auf. So können Programmierer und Ingenieure konkrete Anpassungen offline vornehmen, bevor die reale Anlage in Betrieb geht. Das Ergebnis sind schnellere Inbetriebnahmen, geringere Projektkosten und eine zuverlässige Amortisation in bereits frühen Projektphasen. Wartungsaufwand sinkt merklich, und Projektteams gewinnen Zeitreserven.
Neue kostenlose RoboDK Webversion senkt Einstiegshürde durch intuitive Benutzeroberfläche
Mit RoboDK Web können Anwender ohne lästige Installationsprozesse im Browser Robotersimulationen und einfache Steuerungsprogramme erstellen. Die intuitive Menüführung sorgt für eine klare Struktur und ermöglicht schnelles Navigieren durch Modelle, Bewegungssequenzen und Parameter. Visualisierungen erscheinen unmittelbar und bieten Einblick in Bahnplanungen sowie potenzielle Kollisionen. Dank geringer Einstiegshürden finden auch Nutzer ohne Vorerfahrung Zugang zu moderner Offline-Programmierung und können ihre Projekte unkompliziert testen und optimieren. Zusätzlich stehen Vorlagenbibliotheken und Analysewerkzeuge direkt im Browser bereit.
Ohne Installation importiert die Webversion vielfältige CAD-Formate und mehr
Die kostenlose Webanwendung bietet volle Unterstützung für eine breite Palette gängiger 3D- und CNC-Dateiformate – darunter STEP-, IGES-, G-Code- oder APT-Files und andere Standards. Sobald ein Modell oder Bearbeitungsplan hochgeladen wurde, können Ingenieure die Daten ohne Medienbruch in RoboDK Professional übernehmen. Dort stehen zusätzliche Module für präzise Pfadoptimierung, Bewegungsanalyse und integrierte Kollisionskontrolle zur Verfügung, was eine reibungslose virtuelle Inbetriebnahme und effiziente Robotersimulation sicherstellt. Nahtlose Datenkompatibilität erleichtert Teamarbeit und verkürzt Projektlaufzeiten.
Kompatibel mit Windows macOS Ubuntu Raspberry Pi Android iPhone
Mit RoboDK genügt eine einzige Lizenz, um beliebig viele Roboter offline zu programmieren und zu simulieren – unabhängig von Marke oder Komplexität. Weltweit greifen bereits über 50.000 Anwender in mehr als 50 Ländern auf diese skalierbare Automatisierungslösung zu. Für einen einmaligen Betrag von 3.995 ? wird eine lebenslange Lizenz inklusive umfangreicher Online-Dokumentation, didaktisch aufbereiteter Trainingsunterlagen sowie eines praxisorientierten Fünf-Schritte-Leitfadens geboten. Die Software unterstützt Windows, macOS, Ubuntu, Raspberry Pi, Android und iOS.
Von 200 Robotern und zwanzig Herstellern zu globaler Automationsplattform
RoboDK wurde im Januar 2015 von Albert Nubiola als Spin-off des renommierten CoRo-Labors der ETS University Montreal gegründet. Die anfängliche Softwarebibliothek umfasste rund 200 Roboter verschiedener Hersteller und bildete die Grundlage für spätere Entwicklungen. Seither hat sich die Plattform erheblich ausgebaut und unterstützt über 1.200 Robotermodelle von mehr als 80 Anbietern. Heute greifen sowohl innovative Start-ups als auch etablierte Großkonzerne auf RoboDK zurück, um ihre Automatisierungsprozesse effizient zu gestalten.
Mit virtueller Inbetriebnahme und RoboDK entfallen zeitintensive Tests an realen Anlagen, da komplette Roboterzellen vorab digital validiert werden. Anwender erstellen detaillierte und realitätsnahe Offline-Programme, simulieren Greiferwechsel, Bahnkurven und Prozessschritte und erkennen potenzielle Probleme wie Kollisionen oder Engpässe. Dies führt zu deutlich kürzeren Inbetriebnahmezeiten und einer höheren Anlagenverfügbarkeit. Mit der gebührenfreien Webversion lassen sich erste einfache Konzepte ohne Installation umsetzen, was die Akzeptanz bei Neueinsteigern steigert und Projektlaufzeiten weltweit verkürzt.











